
通用相机
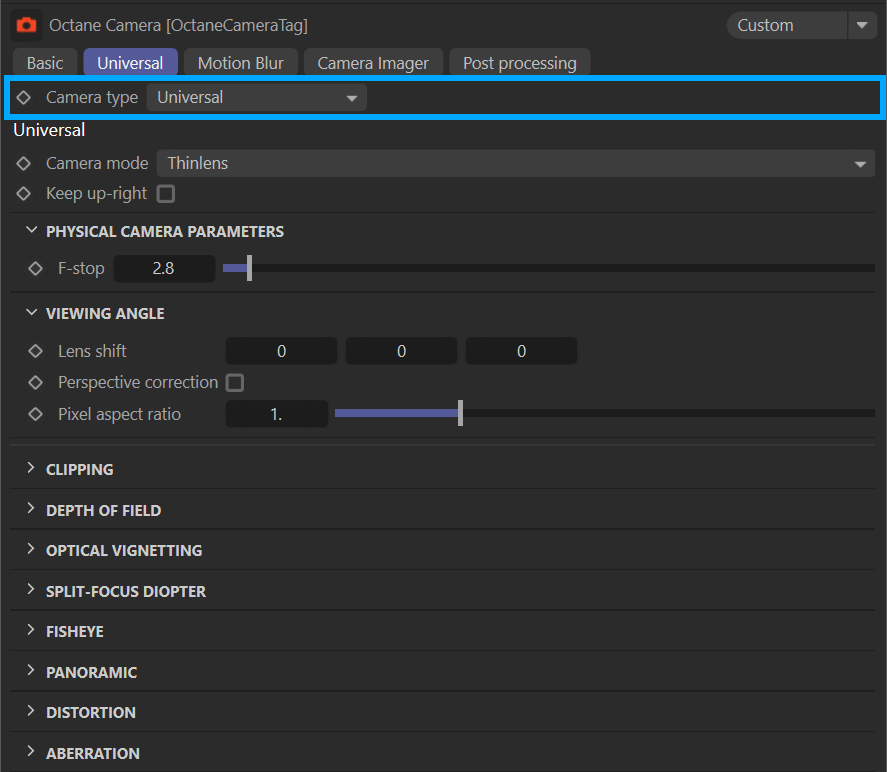
OctaneRender® 中的通用相机是一种功能齐全的相机,具备大量模拟真实世界摄影镜头的特性,并支持五种不同的相机类型:
- 薄透镜- Octane 默认的相机类型。
- 正交- 移除图像中的所有透视效果。
- 鱼眼- 超广角 / 球面效果,由 [此处](UniversalCamera.md#Fisheye)
讨论的参数控制
- 等距矩形- 特殊用途格式,由 [此处](UniversalCamera.md#Panoramic)
讨论的全景属性控制
- 立方体贴图- 根据全景部分中的立方体贴图布局,将环境重新投影为一系列位于画面构图中的矩形图像


#### 物理相机参数
- F-Stop - 光圈与焦距的比值。
#### 视角
指相机镜头可见的区域。以下属性会受到 OctaneCamera 对象主属性面板中“对象”选项卡数值的影响。
- 镜头偏移- X 方向以图像宽度为比例,Y 方向以图像高度为比例进行偏移。第三个数值将被忽略。
- 像素宽高比- 渲染像素的 X:Y 宽高比
#### 裁剪
- 近裁剪深度 - 相机到最近裁剪平面的距离,单位为米。
- 远裁剪深度 - 相机到最远裁剪平面的距离,单位为米。
#### 景深
景深是指画面中处于清晰对焦状态的最近与最远物体之间的距离。
景深效果依赖于 F-Stop 数值以及以下参数。当 F-Stop 越接近 0,景深效果越明显。
- 自动对焦 - 无论光圈、光圈边缘或焦距深度如何变化,始终保持焦点在画面中心最近的可见表面。该选项默认启用。
- 焦距深度- 对焦平面的深度,单位为米。若调整该参数未看到效果,请确认自动对焦已启用;自动对焦会覆盖该设置。
- 光圈- 相机镜头开口的半径,单位为厘米。较低数值具有较大的景深,较高数值会产生较浅的景深。
- 光圈宽高比- 允许拉伸或压缩景深圆盘形状。
- 光圈形状- 控制光圈的形状。
- 圆形
- 多边形
- 缺口
- 自定义光圈 - 设置自定义光圈不透明度贴图。投影类型必须设置为 OSL Delayed UV。
- 光圈边缘- 调整光线在光圈中的分布,影响散景边缘的硬度。0 表示无明显景深,较高数值会增强边缘对比。
- 叶片数量- 构成光圈叶片的数量。
- 光圈旋转- 光圈形状的旋转角度(度)。
- 光圈圆度- 光圈叶片的圆润程度。
- 中心遮挡- 模拟折反射系统中副镜造成的遮挡,仅在圆形光圈下启用。
- 缺口位置- 选择缺口光圈形状时,控制缺口的位置。
- 缺口缩放- 选择缺口光圈形状时,控制缺口的大小。
#### 光学暗角
指图像在画面边缘或镜筒边界处变暗的现象,这是由于“光衰减”造成的。该效果可用于引导观众视线集中到画面中心。
- 距离- 镜头与镜筒开口之间的距离。
- 缩放- 镜筒开口相对于光圈的比例。
#### 分割对焦屈光镜
分割对焦功能允许相机在两个独立区域进行对焦。该效果模拟真实摄影中安装在镜头前端的屈光镜滤镜。参数说明如下:
- 启用- 启用分割对焦屈光镜。
- 屈光镜焦距深度- 对焦平面的深度,单位为米。
- 旋转- 分割对焦屈光镜的旋转角度。
- 平移- 分割对焦屈光镜的位置偏移。
- 边界宽度- 两个对焦区域之间的边界宽度。
- 边界衰减- 控制分割对焦区域与主焦距之间的过渡速度。
- 显示辅助线- 显示参考线,切换该选项会重新开始渲染。
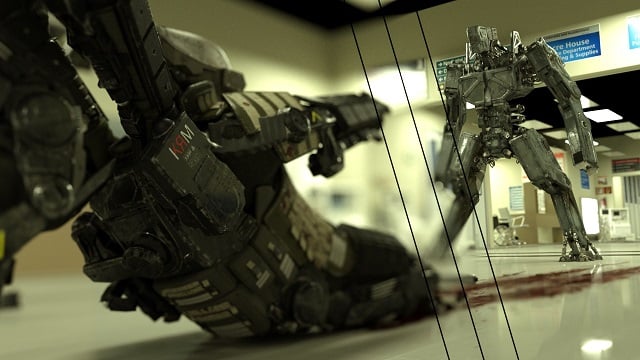
下图展示了分割对焦屈光镜的实际效果。


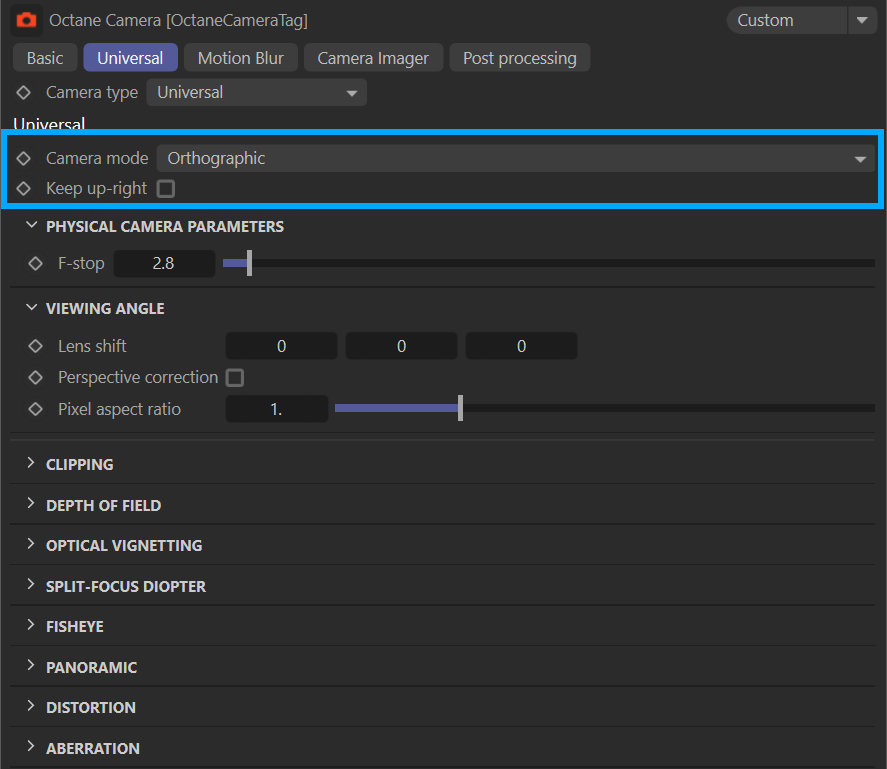
#### 正交
正交或等轴测投影以无透视失真的方式显示场景。通常,Cinema 4D 的前视、顶视和侧视视口使用正交投影,而 3D 并行视口使用等轴测投影。若要渲染等轴测视图,请将 Octane
相机类型设置为通用,相机模式设置为正交,并启用下方的正交开关。同时将 Cinema 相机投影设置为 Camera Object > Object 选项卡 > Projection
菜单:Parallel。 Live Viewer 中的结果将与 Cinema 视口一致,必要时可调整如 Zoom 等参数。
需要将相机模式设置为“正交”,并启用正交开关。
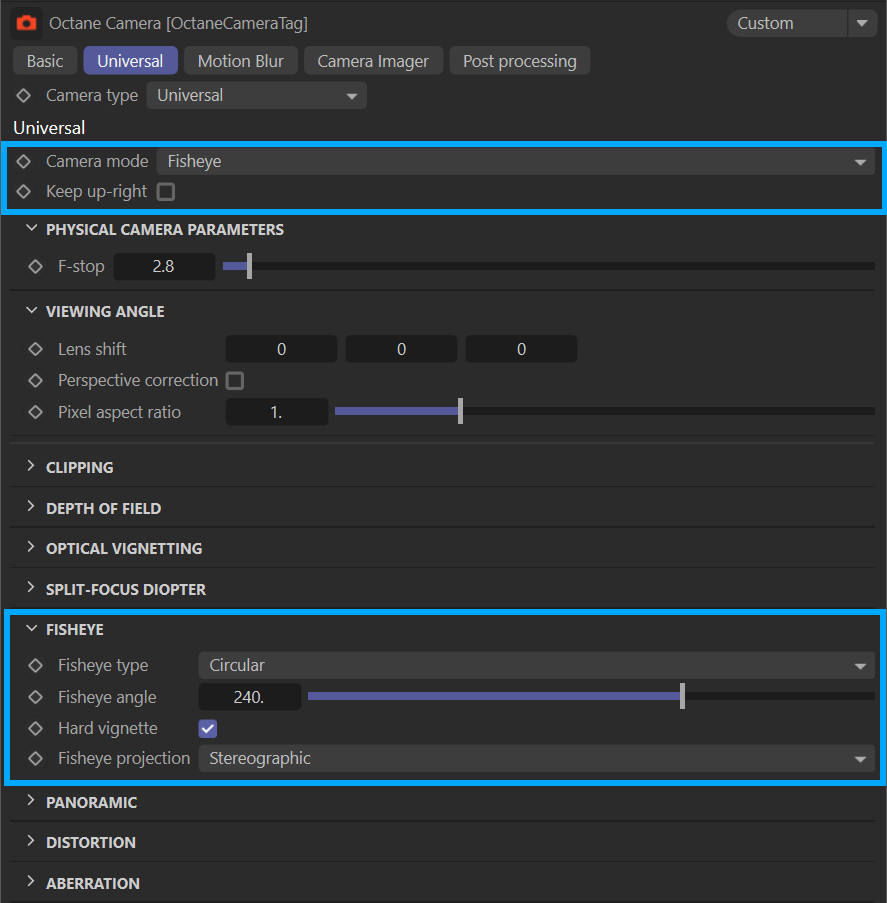
#### 鱼眼
鱼眼镜头提供极大的视角,将图像扭曲为宽广的全景或半球形。这种效果在虚拟现实(VR)中是必需的,天文馆投影仪也使用特殊的球面镜头将星空等天文现象投射到穹顶上。
需要将相机模式设置为“鱼眼”。
- 视场角- 相机的视场角,单位为度。
- 鱼眼类型- 选择覆盖传感器的镜头圆形区域或覆盖整个传感器。
- 硬暗角- 渲染镜头边界(仅限圆形鱼眼)。
- 鱼眼投影- 鱼眼所使用的投影函数。
#### 全景
全景镜头可用于创建虚拟现实或增强现实中常用的特殊图像格式。现实世界中的相机通常需要拼接多张照片才能实现该功能,而此处可直接完成。
需要将相机模式设置为 等距矩形。
- 水平视场角- 水平方向的视场角(度),在使用立方体贴图时该项将被忽略。
- 垂直视场角- 垂直方向的视场角(度),在使用立方体贴图时该项将被忽略。
- 立方体贴图布局- 确定立方体贴图的布局方式。
- 等角立方体贴图- 启用等角立方体贴图投影。
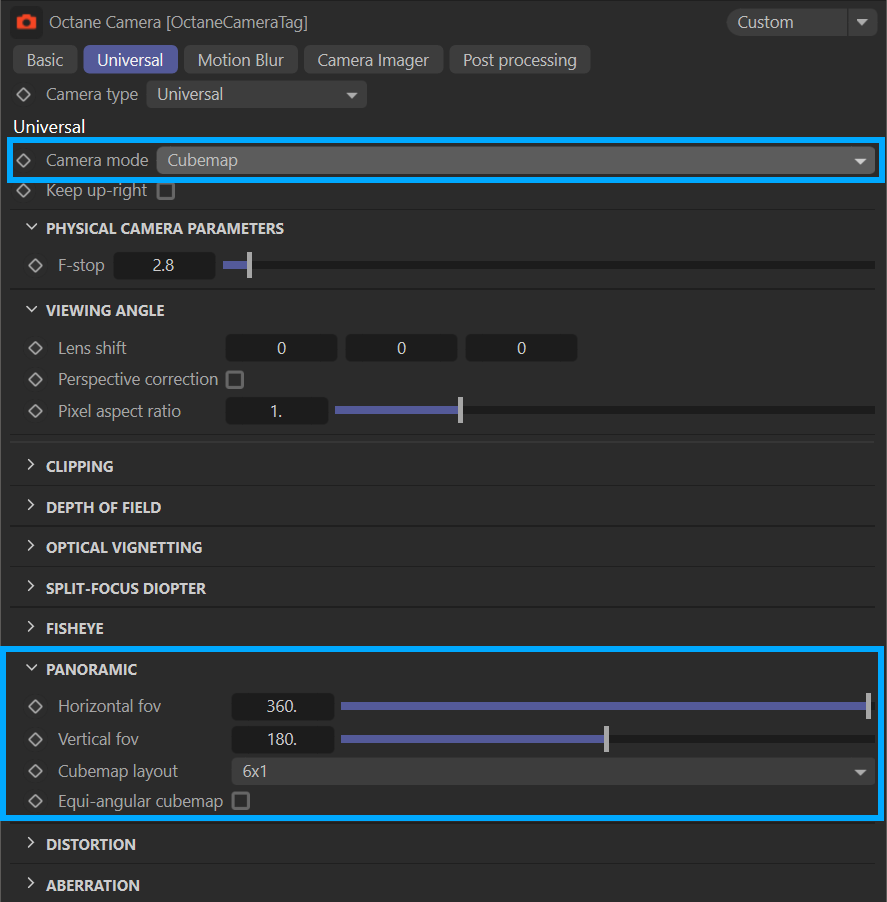
将相机模式设置为立方体贴图或矩形
#### 畸变
现实世界中的镜头并非完美制造,常常会产生各种伪影,其中之一便是畸变。在某些情况下,为了匹配实拍素材的外观,需要人为引入镜头畸变。
需要将相机模式设置为 薄透镜。
- 使用畸变纹理- 启用畸变纹理。
- 畸变纹理- 畸变纹理输入。
- 球面畸变- 球面畸变强度。
- 桶形- 直线看起来发生弯曲。
- 桶形(角落)- 直线弯曲,并主要影响画面角落。
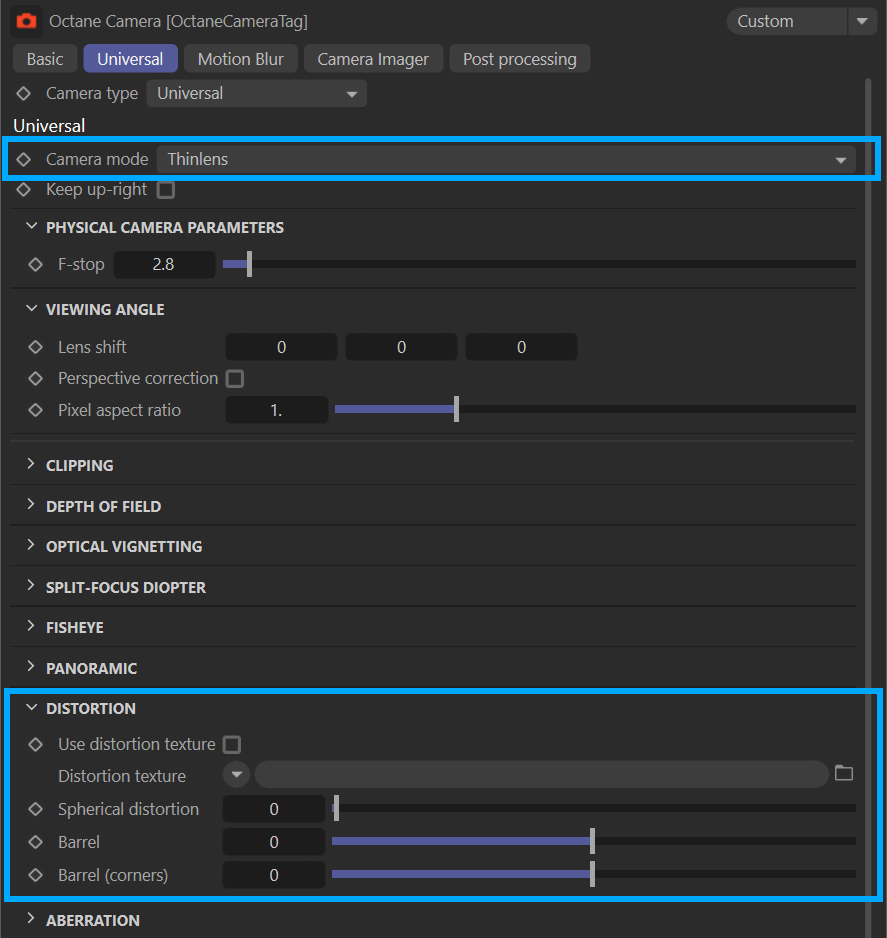
将相机模式设置为薄透镜
#### 像差
与畸变类似,像差同样存在于真实镜头中,会产生多种视觉伪影,通用相机可以对其进行模拟。
- 球面像差- 入射到镜头边缘的光线在更靠近镜头的位置聚焦。
- 彗差- 入射到镜头边缘的光线具有更大的视场。
- 像散- 弧矢光线与切向光线在不同距离处聚焦。
- 场曲- 对焦平面的曲率。
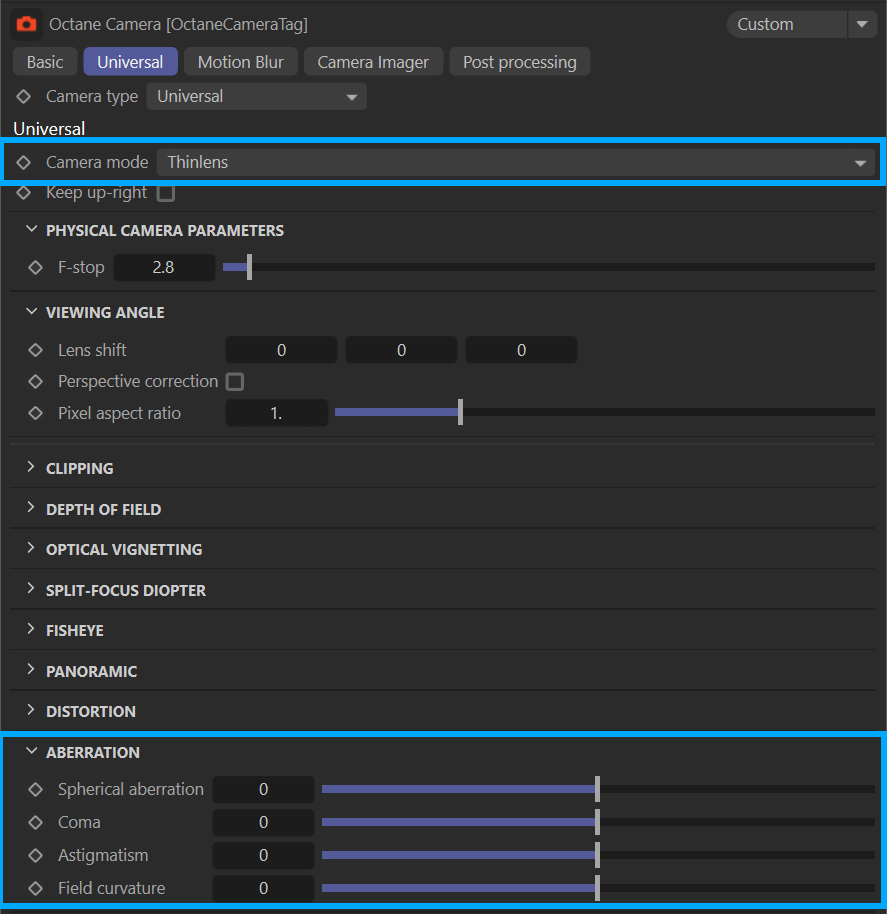
将相机模式设置为薄透镜